Preliminaries¶
Some basic terminology¶
Each MRI image contains information about a three-dimensional (3D) volume of space. An MRI image is composed of a number of voxels; the voxel size is the spatial resolution of the image. A voxel is a 3D unit of the image with a single value, just as for digital photographs a pixel is a 2D unit of the image with a single value. The words image and volume (and sometimes scan) are often used interchangeably to mean “a single 3D representation of brain data”. The size of the voxel gives some indication as to the spatial resolution of the data, with smaller voxels giving a higher spatial resolution. A typical voxel size for a structural MRI is 1 mm x 1mm x 1mm; for fMRI, 3 mm x 3 mm x 3 mm. However, these can vary substantially from study to study.
It is also possible to have 4D image files—in other words, a series of 3D image files. Generally this is a timeseries; so, for a single continuous scanning run, the same data could be represented by a large number of 3D image files, or a single 4D file (containing the same number of 3D functional volumes). However, 4D files could also be used to store a single image per subject, for example, when doing group analyses. FSL makes frequent use of 4D images. SPM supports 4D images under certain circumstances, but it is possible to conduct all steps using multiple 3D images.
In the MRI sequences used for most fMRI studies, each volume of the brain is acquired in a series of slices. Thus, each slice is acquired at a different point in time within the TR. Knowing the order in which the slices are acquired (ascending, descending, interleaved) can be important for certain preprocessing steps. Within a slice, the voxel dimensions are almost always equal in size (the “in-plane resolution”), although the thickness of a slice may differ. If voxels are equal in size in all three dimensions (e.g., 3 mm x 3 mm x 3 mm), they are isotropic.
The time it takes to acquire an entire volume is the TA (acquisition time). The time between repeated volumes (i.e., between collecting a slice in one volume, and that same slice in the next) is the TR (repetition time). If one is collecting data as quickly as possible (as is usually the case), there will be no pause between volumes that are collected, and thus the TA and TR are equal. Because of this many people use the terms interchangeably. However, it is possible to have a TR that is longer than the TA, which would result in a pause in data collection. This is sometimes done in auditory studies to allow stimuli to be presented in quiet (in the absence of echoplanar scanner noise).
Note
There are actually two ways in which the term “TA” can be used. The first is as described above; that is, the total time it takes to acquire a volume (from the beginning of the first slice to the end of the last slice). However, it can also be used to refer to the time from the beginning of the first slice to the beginning of the last slice. This is the convention in SPM’s slicetiming correction. In a continuous scanning paradigm (no break between scans), this TA can be calculated by: TA = TR - (TR/number_of_slices).
An fMRI experiment may last for an hour or more, but very rarely will scanning be continuous for this hour. Typically there will be a 5–20 minute sequence of scanning, and then a break to ensure the subject is comfortable, before resuming scanning. These breaks are important to note when performing analysis, as many stages of analysis make assumptions about how related one volume is to the next. A single continuous series of scans is typically called a “run”, “block”, or “session”. SPM refers to these as “sessions”, which is the terminology that will be used here. Think of a session as “any continuous period of scanning”; it doesn’t matter whether these are separated by 30 seconds or a week.
Sometimes rather than brain activity, measured with fMRI, we are more interested in brain structure. A common way to analyze individual differences in brain structure is to look at the volume or density of tissue in an anatomically-defined region. Voxel-based morphometry (VBM) is an objective process for doing this with structural MRI images. It makes use of several of the same processing steps as a functional analysis, but is generally somewhat simpler because there is no temporal information to take into account. VBM deals with brain volume (or density); an alternate way to investigate similar questions is using cortical thickness measurements.
In general, it’s often helpful to think of MRI analyses in two phases: preprocessing, which prepares images for being entered into a model), and statistical testing. Multiple statistical models can be run on the same set of preprocessed data.
Finally, you may hear reference to “1st level” or “2nd level” analyses. This refers generally to variations on a summary statistics approach in which data for each subject are analyzed independently, and then the results from these analysis (i.e., the parameter estimates) are entered in a group analysis. In fMRI, a 1st level analysis generally refers to analysis of a single subject’s timeseries. Results from this analysis would tell you whether, for this subject, a region showed significant activation for a given paradigm. A 2nd level analysis is equivalent to a group study, in which linear contrasts of parameter estimates are fit with a statistical model. Results from a 2nd level analysis would tell you whether a pattern of activation is significant across a group (and thus likely to generalize across a population). For structural MRI analyses, most often there is a single image per subject to begin with (because there is no timeseries to analyze), and thus most analyses are 2nd level (group) analyses.
File types¶
Nearly all modern software packages use the Nifti file format (http://nifti.nimh.nih.gov/nifti-1/). Nifti files can be a single file (with an .nii extension), or image/header pairs (file1.img, file1.hdr). In both cases, there are two sets of information about each image:
- The header information, which contains information necessary to interpret the image. This includes things like how the data are encoded, and how the voxel space of the image translates into the physical space of the world (voxel-to-world mapping).
- The image data themselves; for each voxel, a single value.
Among many other issues, standardization to the Nifti format means that the orientation of MRI images is unambiguous; i.e., Nifti-compatible software should always know what side of the brain is left, and what side is right. However, in older datasets, or with software that is not Nifti-compliant, this may not be true.
Navigating your way around the brain¶
“Talairach” space¶
Broadly speaking, Talairach space is a three-dimensional cartesian coordinate system aligned over the brain as proposed by Talairach & Tournoux [TalairachTournoux1988]. Although sometimes it can refer to the actual millimeter-by-millimeter alignment proposed in this atlas, it can also refer to this general system of alignment, which is how I intend it here. Within this system, the [0,0,0] point (X=0, Y=0, Z=0) is the anterior commisure, and:
- Negative X values indicate the left hemisphere, postive X values the right.
- Negative Y values towards the rear of the brain (relative to the anterior commisure), positive toward the front.
- Negative Z values towards the bottom of the brain (relative to the anterior commisure), positive toward the top.
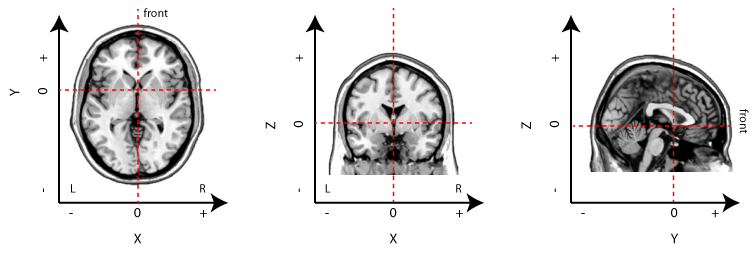
Schematic of stereotaxic brain coordinates on axial (left), coronal (middle), and sagittal (right) slices. The origin (X=0, Y=0, Z=0) is centered on the anterior commisure.
Anatomical descriptions¶
- Towards the front of the brain (towards the eyeballs): anterior, rostral.
- Towards the back of the brain (opposite the eyeballs): posterior, caudal.
- Towards the top of the brain: dorsal, superior.
- Towards the bottom of the brain: inferior.
- Towards the middle of the brain: medial.
- Towards the outside edges of the brain: lateral.
Slice orientations¶
- Axial are parallel to the top of the head and the floor, if you are standing straight.
- Saggital slices are parallel to the interhemispheric commisure (dividing the brain in two).
- Coronal slices are parallel to the face, perpendicular to the floor.
Note
In neurological convention, the left of an MRI image as you view it is the left side of the brain. In radiological convention the left side of an MRI as you view it is the right side of the brain. Both approaches are used in the literature. Because both convention are used, when presenting results this should be indicated on the figure or in the caption to avoid confusion.
